I’m working on a project to use databot for calculating roll, pitch, and yaw of a simulated drone. I know databot can give linear acceleration on each axis as well as rotation in radians/sec. I can “fuse” this sensor data together as discussed here to calculate the angle of rotation on each axis. I’m using JavaScript so this shouldn’t be a problem, but I’m curious if there is a config param that can be sent to databot for it return these values directly?
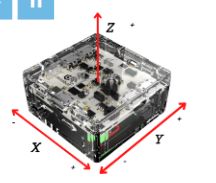
Hello here is the axis representation of the databot, take a look.
Let me know if you need something else.
I’d like to know how I can expose RPY to our app from this method:
We are familiar with Arduino and would like to introduce a new config value so that when we send it to databot it will respond with these values over bluetooth. Would this be possible?
The library that we are currently using does provide such IMU fusion and has many ready-to-use functions that can be utilized.
But right now we are not sending data for the roll, pitch and yaw via BLE.
If you need to send those data then we need to modify the code little bit.
And if you plan to get this data then you need to enable them in the setting in def.h
ArduinoICM20948Settings icmSettings =
{
.i2c_speed = 400000, // i2c clock speed
.is_SPI = false, // Enable SPI, if disable use i2c
.cs_pin = 10, // SPI chip select pin
.spi_speed = 7000000, // SPI clock speed in Hz, max speed is 7MHz
.mode = 1, // 0 = low power mode, 1 = high performance mode
.enable_gyroscope = true, // Enables gyroscope output
.enable_accelerometer = true, // Enables accelerometer output
.enable_magnetometer = true, // Enables magnetometer output // Enables quaternion output
.enable_gravity = false, // Enables gravity vector output
.enable_linearAcceleration = true, // Enables linear acceleration output
.enable_quaternion6 = false, // Enables quaternion 6DOF output
.enable_quaternion9 = false, // Enables quaternion 9DOF output
.enable_har = false, // Enables activity recognition
.enable_steps = false, // Enables step counter
.gyroscope_frequency = 5, // Max frequency = 225, min frequency = 1
.accelerometer_frequency = 1, // Max frequency = 225, min frequency = 1
.magnetometer_frequency = 5, // Max frequency = 70, min frequency = 1
.gravity_frequency = 1, // Max frequency = 225, min frequency = 1
.linearAcceleration_frequency = 1, // Max frequency = 225, min frequency = 1
.quaternion6_frequency = 50, // Max frequency = 225, min frequency = 50
.quaternion9_frequency = 50, // Max frequency = 225, min frequency = 50
.har_frequency = 50, // Max frequency = 225, min frequency = 50
.steps_frequency = 50 // Max frequency = 225, min frequency = 50
};
As per need you need to set enable_quaternion6 or enable_quaternion9 to true.
Then the library will start calculating quaternions datas.