Ok, so to clarify this is the new thread for using the Go1 Vision Sensor Curriculum, questions, answers (hopefully), and lessons learned in the process.
The first few posts will be repeats of previously posted comments from another thread (as I accidently hijacked it).
The zip file does indeed, NOT contain the requirements.txt file. We carefully watched the command line running and installed numpy and opencv-python in the virtual environment by hand (Introduction: Step 04: 1min 45 sec in the video).
A note when having students watch these videos: Kids watch the video but don’t read the text below to get ready unless you tell them to. As a teacher, make sure you remind them to check all the instructions BEFORE watching the video, especially if something is going wrong.
Question: Treat Detection With Computer Vision: Video: 05 - Tune Color Range Real Time Demo
Time in video: 1:20
Problem: Unsure if what we see is the same as the video. Don’t want to risk breaking anything
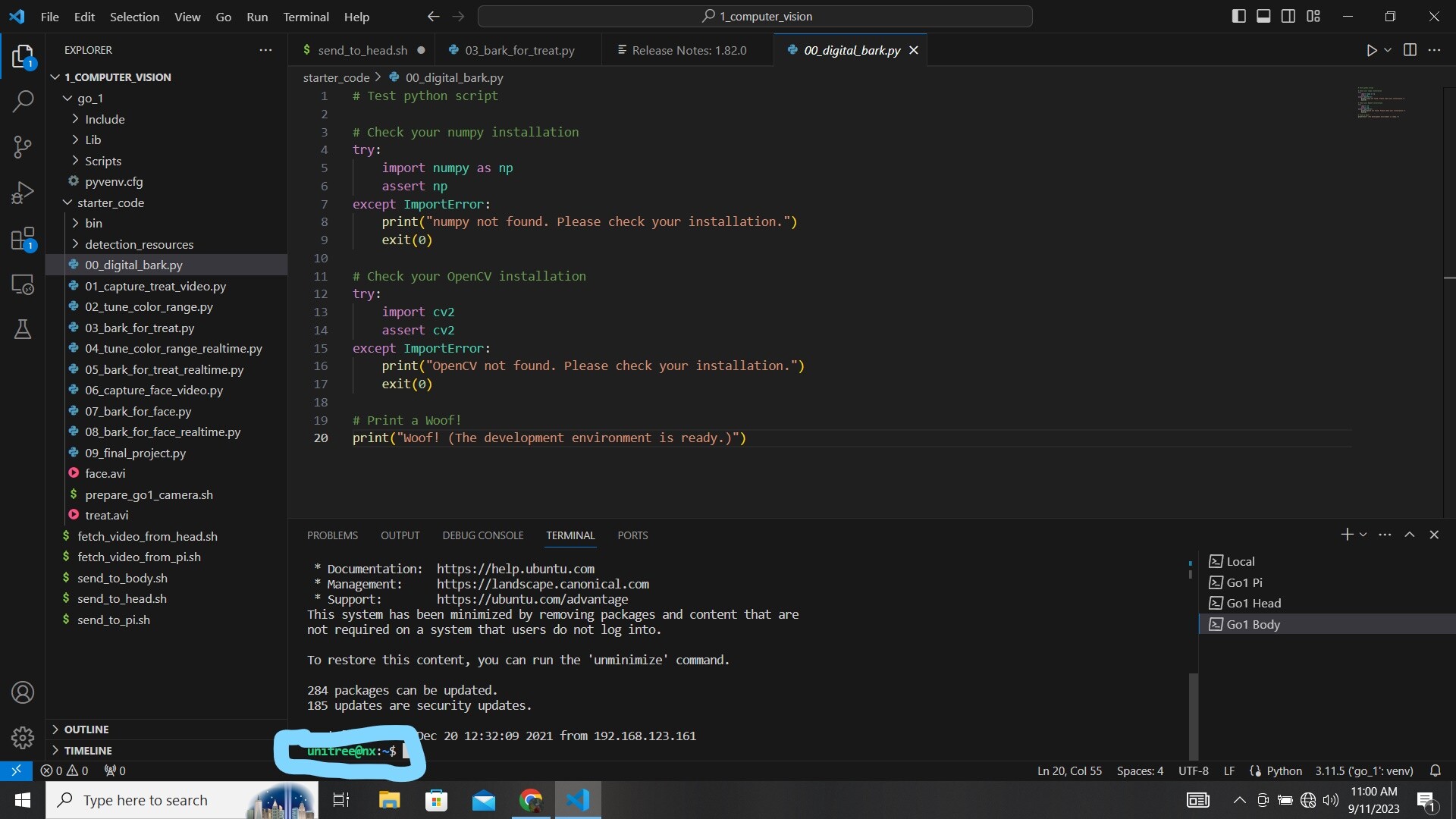
I was about to dive into this again and test myself, but noticed something from your screenshot that differs from mine. Do you have the Go1 EDU with Lidar? It looks like you may have logged into a Jetson Xavier NX, which likely has a different file system than the standard EDU. If that’s the case let me know and I’ll see if we can make the necessary modifications to get you up and running. If that’s not the case then I’ll dive into the lessons in more detail.
We do not have either lidar at all, oh by the way, how expensive is it to add that now? We didn’t realize how much we would be missing with ROS without a laser range finder.
So after logging in to each machine we have the following network topology:
192.168.123.13 (nano2gb) Is a Jetson Nano 2GB Developer Kit
192.168.123.14 (Desktop) is a Jetson Nano Developer Kit
192.168.123.15 (nx) is a Jetson Xavier NX developer kit
@I.TeachPolarBears okay I’ve been going back and forth with the team and it turns out that the zip file with the original lessons was an older one. So all lessons have been updated with a new file that should take care of the problems you mentioned.
Since you have the NX in your Go1 EDU that means you can do the Lidar upgrade. I believe you have reached out to Dave about that. Please let us know how your testing goes and very sorry for the hassle. Thanks for all the testing and feedback.
One thing to add: This was a quote from one of my students, “If you want to be on the bleeding edge, sometimes you’re going to get cut.” We’re just passing out bandaids over here and pushing through.
Yes indeed, I have made contact, gotten a quote and am pushing that up the chain to see if the budget can hold it.
No worries on the trouble, this is what beta testing is about! Also great practice for my students who are getting such a rich education in troubleshooting, problem solving, and documentation of solutions… You can’t pay for the experience they’re getting right now.
What a great quote from your student. I need to stock up on the band-aids! I agree in the importance of troubleshooting. I’d say 25-40% of my time is spent troubleshooting issues with drones/software/etc. It’s really the only way to learn. Glad to hear things are coming along. Please keep us posted.
We need to connect the Go1 to the internet to install a dependency that is not already installed and we are having a world of problems with this. Connecting the Ethernet port does not give a connection to the WAN to the desktop jetson. We have involved our IT team in trying to figure out the network topology and have worked out that the Pi seems to operate as a router with 2 WiFi networks for internal purposes. 192.168.123.1/24 network appears to be the default network for internal connections and also the Pi is broadcasting another WiFi network at 192.168.12.1/24. When we try to add an external route for an WAN connection on the ethernet (RJ45 on top) it never makes it past the 123 network (listed as the default pathway). Are we in need of an update in someway that would change those network connections?
Edit: The package we need to install is OpenCV (which is rather important).
So we have tested installing OpenCV on a Debian virtual machine from a zip file on a flash drive, and also checked on installation of OpenCV on the Go1. It IS installed, but only on the Pi. In the process of testing, there were attempts to connect to Git repositories which will fail on the configure step. I am hoping that those repos are not required for OpenCV to function.
Also, if anyone else wants to attempt this (or if it is necessary for everyone to use it), you will absolutely need a 24v power source that is not the batteries as they will not last long enough for the process to complete (ask me how I know).